Orientation: pitch, roll and yaw
This is also interesting:
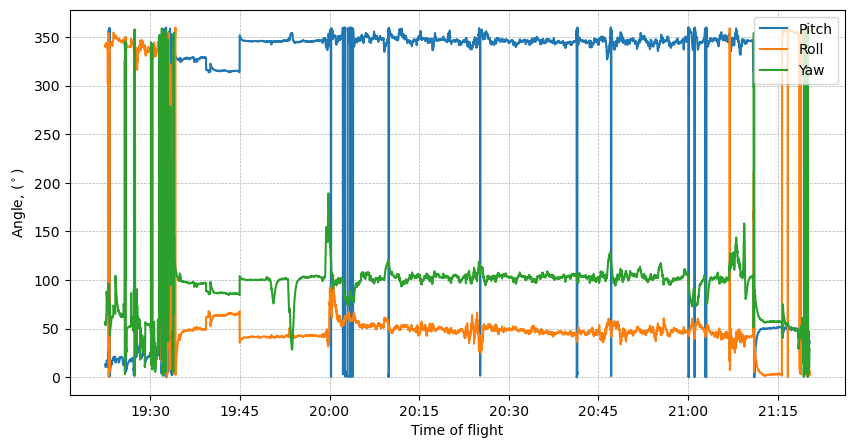
Yaw - left / right pedal corrections quite a lot at the beginning of the flight.
Roll - up / down - quite smooth
Pitch - left / right yoke - quite drastic.
Here is the code:
#Plot Orientation X, Y,Z
plt.figure(figsize=(10,5))
plt.plot(df.index, df['pitch'], label='Pitch')
plt.plot(df.index, df['roll'], label='Roll')
plt.plot(df.index, df['yaw'], label='Yaw')
plt.xlabel('Time of flight')
plt.ylabel('Angle, ($^\circ$)')
plt.legend(loc='upper right')
# plt.xlim(1000,6500)
# plt.ylim(720,1100)
ax = plt.gca() # Get the current Axes instance on the current figure
date_format = plt.matplotlib.dates.DateFormatter('%H:%M') # Set format to hour:minute
ax.xaxis.set_major_formatter(date_format)
ax.grid(axis='both', linestyle='--', linewidth=0.5)
plt.show()
No comments to display
No comments to display